
EEG created using a series of active filters and amplifiers to target observation of alpha and beta brain waves in the 10-30Hz range. EEG proven effective in distinguishing between relaxed and alert states. Future work involves interfacing with computers (ie keystrokes and mouse movement).

Variable airflow volume control and breath interval period set through GUI application. Outlet pressure plotted in realtime. Contains custom designed PCB, Python GUI, stepper motor controller, and a pressure feedback sensor.

Goal is to create an operational mechanical bird that mimics the flight controls of a gull. Instead of props, thrust is generated through stepper motor controlled flapping with servo actuated wing joints.
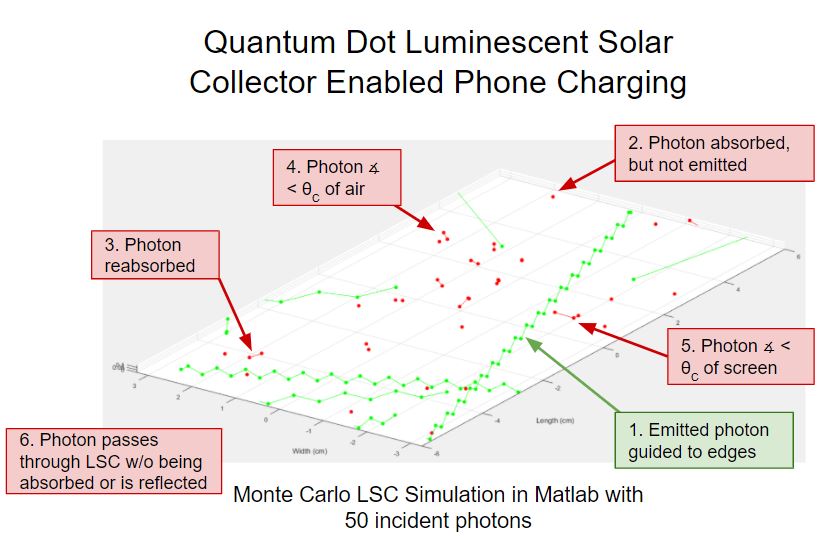
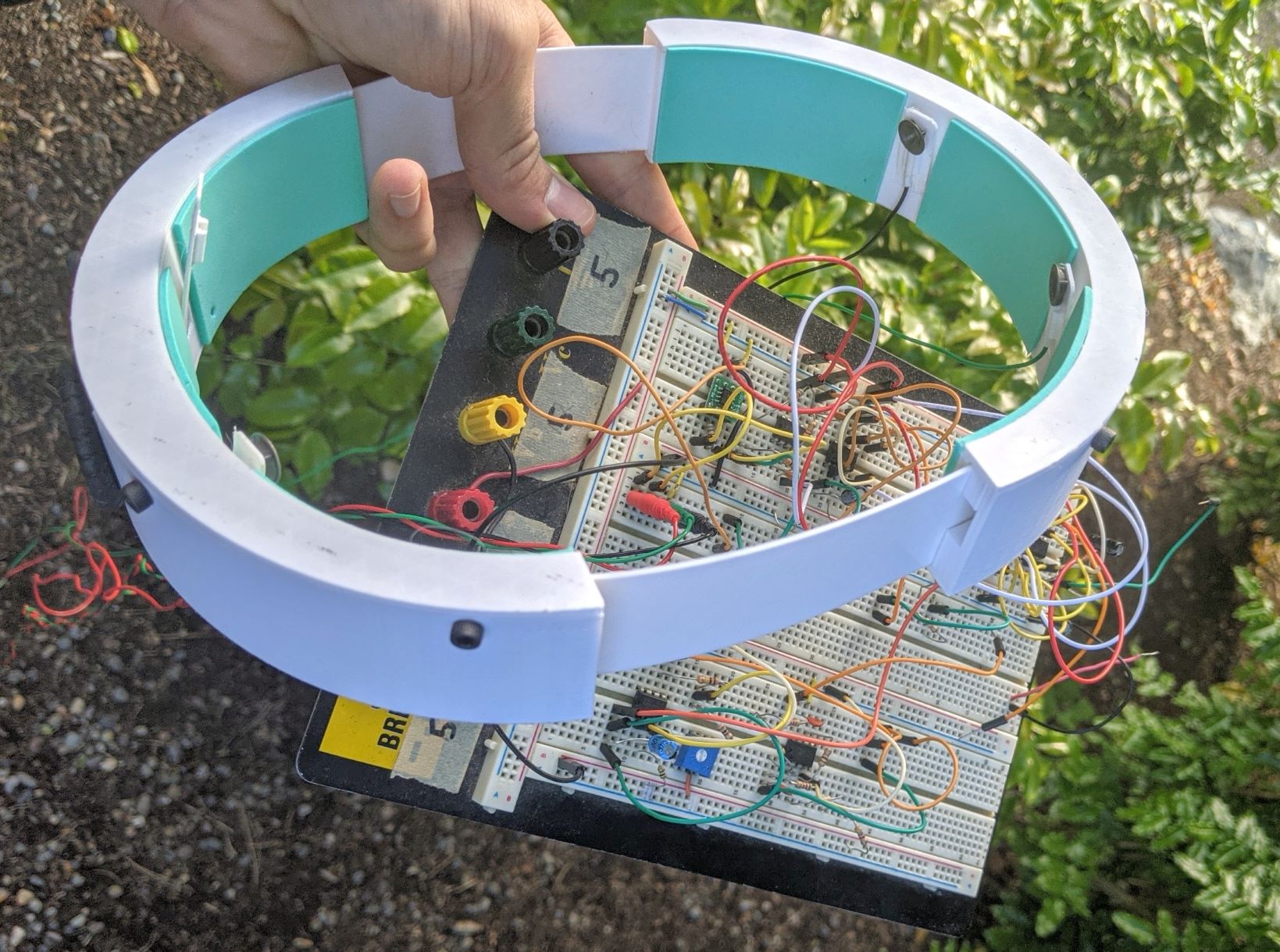
Quantum dot enabled phone charger concept with an overall efficiency of greater than 3%. Uses transparent waveguide luminescent solar collector as a screen protector to internally reflect photons to outer edges.
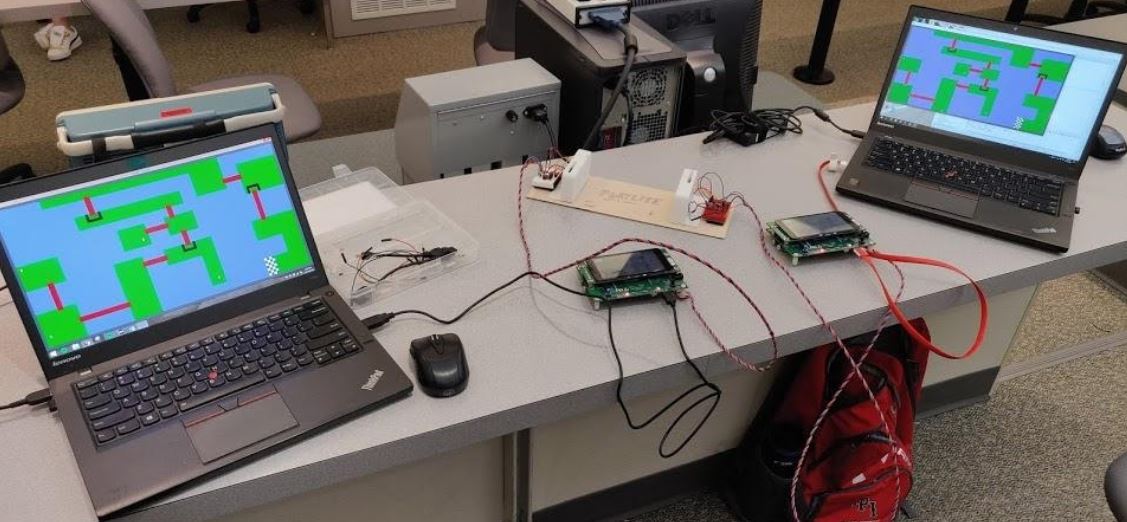
Player raceing game executes entirely on the STM32F769I dev board. Map rendered on laptop display using a USB serial connection and player inputs made through dev board touch screen. Opponent player position is communicated over pulsed laser interface.

SpaceX Falcon 9 Rocket and flight controller modeled in Dymola then visualized in virtual reality. Robust against varying initial conditions and wind.

Blended wing body using carbon fiber composite structure. Wings self fold and lock into place. Successful flight tests but difficulty taking off at competition in Tucson, AZ due to high temperatures and elevation.
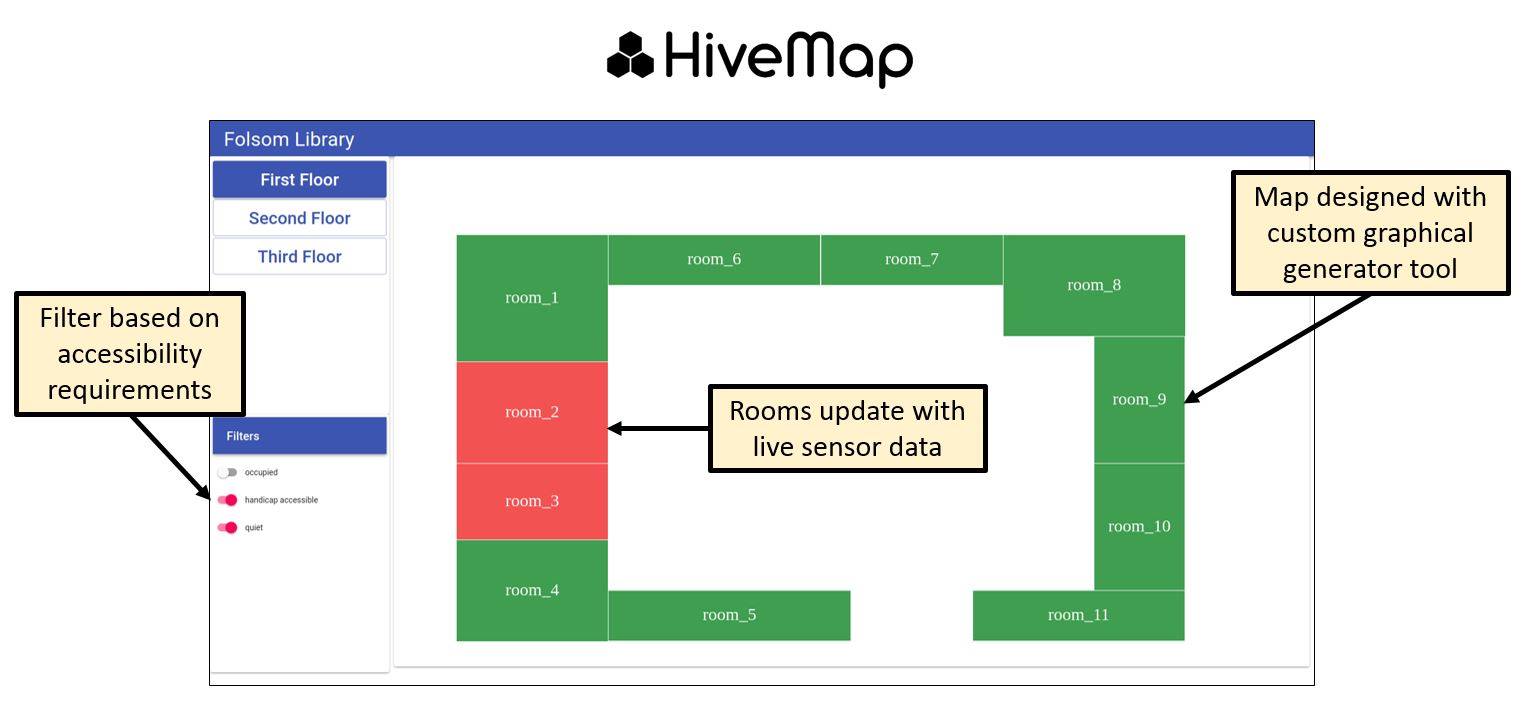
Distributed sensor network determines study room occupancy giving app users a UI to find open rooms. Rooms contains light, movement, & audio sensors that communicate via Bluetooth to determine occupancy. Each room sends status to central Raspberry Pi via WiFi.

Created avionics hardware in the loop test rack to simulate the Falcon 9 recovery process. Contained avionics systems found on the recovery vessel and the fairing halves with additional simulation hardware for GNC engineers to develop control software for the fairing parasail and reaction thrusters.

Point system favored aircraft with short wingspan so biplane configuration was chosen. CNC foam halves sandwiching balsa wood structure for easy access to passengers & electronics. Propolusions lead engineer responsible for motor, propeller, battery packs, receiver, and electronics. Completed first mission and ground mission at competition in Wichita, KS.

Zero G environment means CO2 pockets form on the ISS causing lightheadedness. Assembled and soldered PCBs and battery packs for wearable CO2 sensors worn by astronauts on the ISS for detecting CO2 pockets.
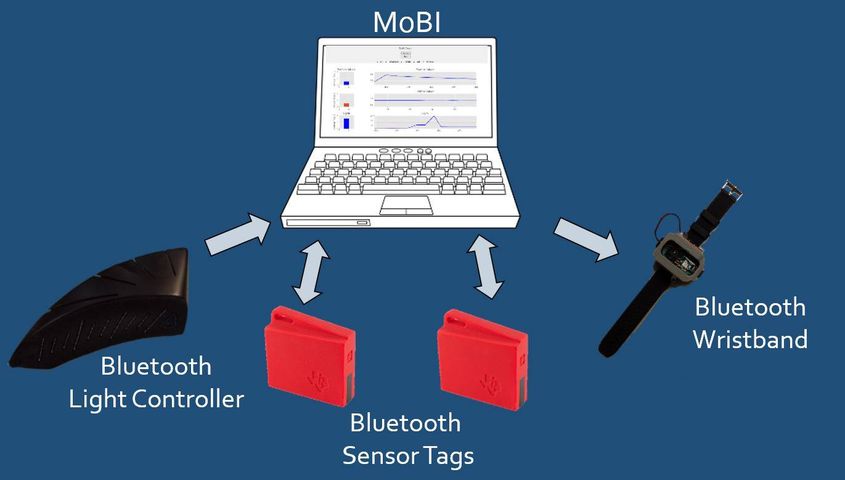
IoT wearable revolution enables astronaut's health to be constantly monitored with Bluetooth sensors. MoBI runs on a central computer allowing it to connect and receive data from multiple sensors at once. Troubleshooted bugs in the code and created use case demonstration using multiple Bluetooth devices.

Aircarft needed to fit inside a tube and maximize its carrying capacity for a hockeypuck payload. Airplane developed with a 90 degree rotating wing and tail that lock into place then slid inside the tube. Aircaft flew first lap at competition but Tucson dessert winds resulted in a severe crash.

Autonomous barge boat contains a winch lowered sensor pack to continuously monitor the health of lakes in upstate NY. Designed electrical systems, structure, and developed code. Boat is self powered with a 300W solar panel and battery pack and takes input scripts that are remotely sent from shore via a cellular gateway.
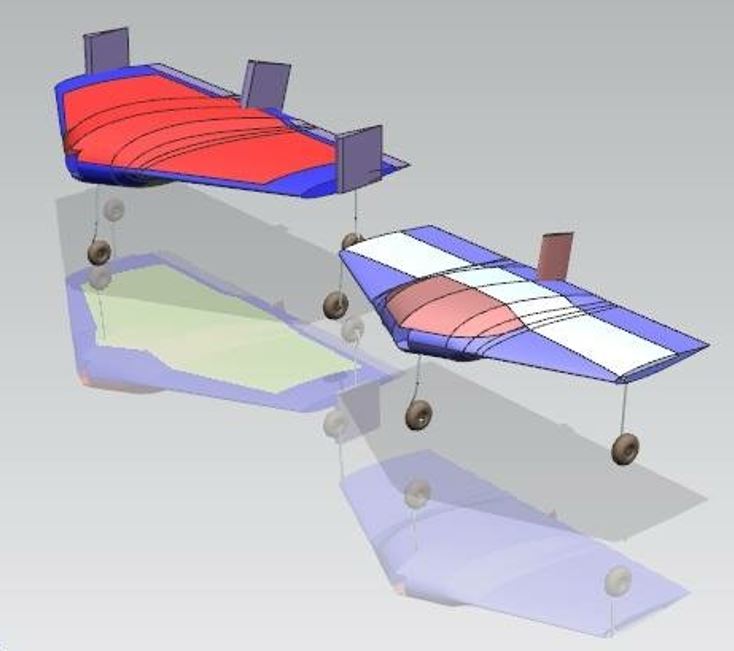
Competition called for two aircraft. The smaller aircraft had to contain a filled Gatorade bottle and the larger aircraft had to contain the smaller aircraft. Designed and built two blended wing body aircraft CNC'd from insulation foam. The smaller aircraft nested inside the larger one. Aircraft flight tested too close to competition and resulted in a severe crash.
Building from the previous years experience creating a quadcopter, I set out to create a VTOL aircraft with servo tilted motors inspired by the V-22 Osprey. In the vertical position it operated as a standard quadcopter. Once in the air, the motor angle could be controlled with the back two motors pushing giving more efficient forward thrust. Foam airfoil created but not tested to date.

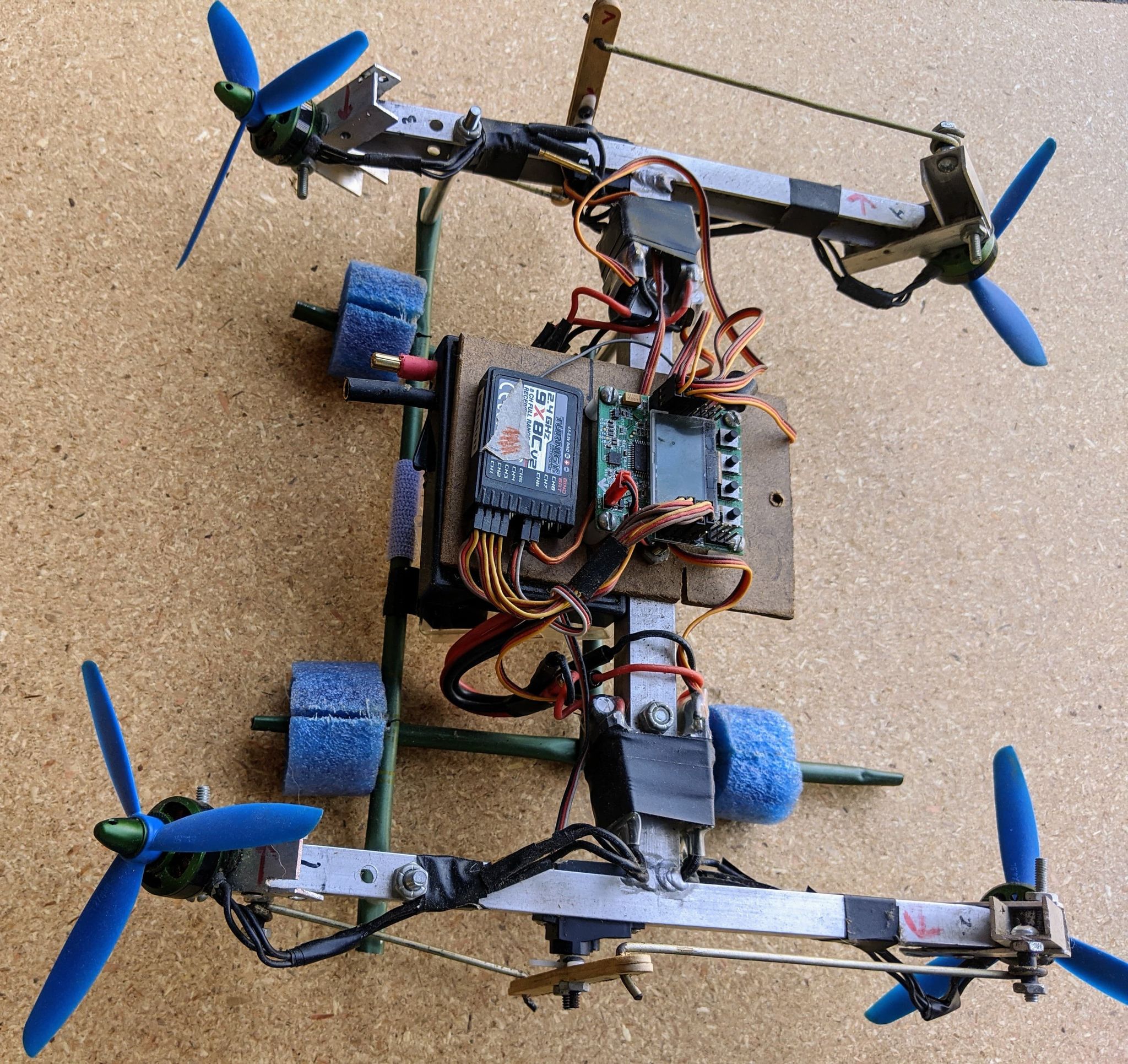
Quadcopters were becoming more accessible with prebuilt options but decided to design and build my own custom one. Designed 2.5 foot wide structure in CAD and manufactured with my high school's 3D printer. Selected electrical systems for a flight time of over 30 minutes.